Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Role: RDKDC Final Project
Time: 2023/8 - 2023/12
Contribution: Compare Three(3) Control Method for 6DOF Robotic Arm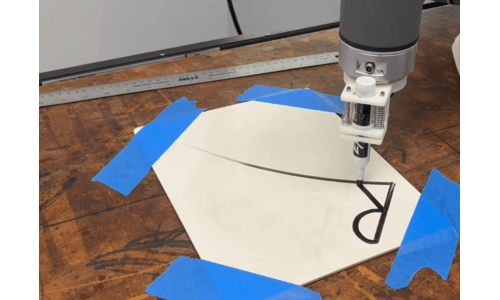
Role: CIS2 Research Project
Time: 2025/2 - 2025/6
Contribution: Replaced the Current ROS Middleware to DDS Middleware and Analyzed the dVRK System Performances.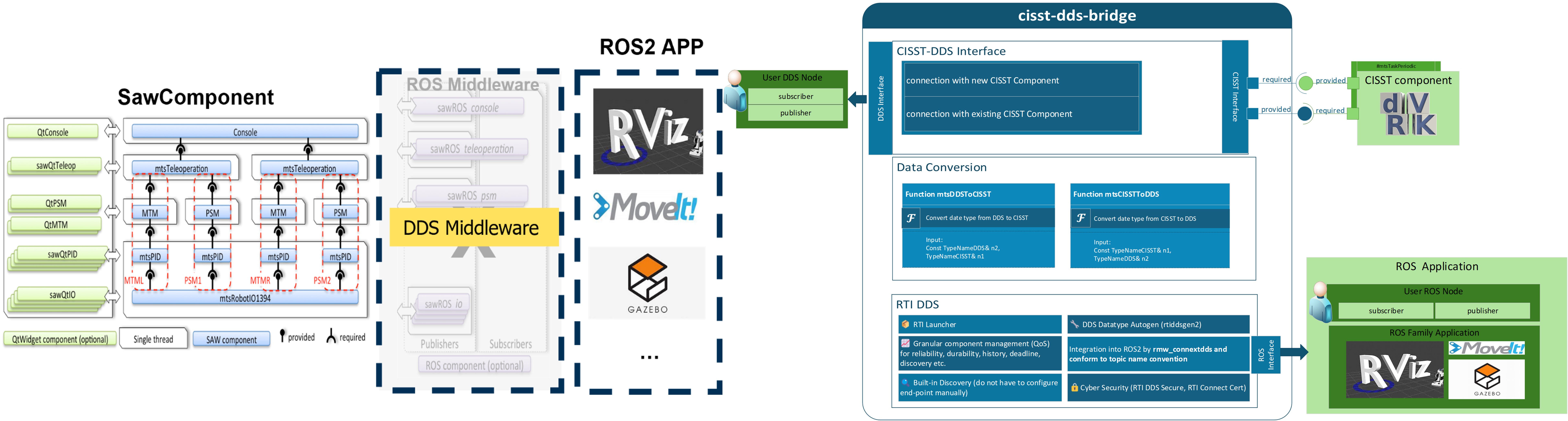
Role: Software Engineer
Time: 2024/6 - 2024/12
Contribution: Developed A Code Generation Tool to Automate the Development Workflow from Idea to Application for Serial Arm Robotic System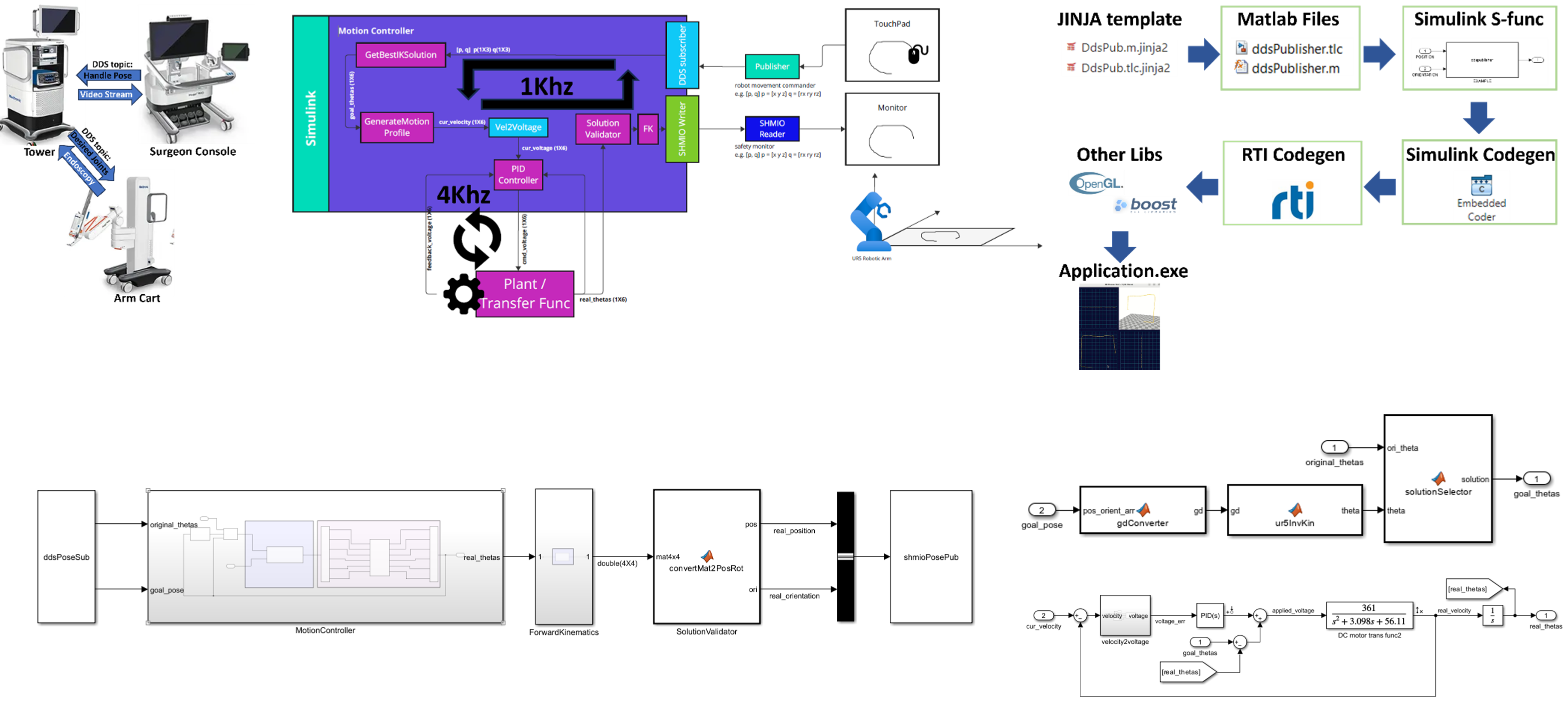
Role: Mechanical Engineer
Time: 2018/09 - 2020/03
Contribution: ElectroSurgical Gas-Control Unit Design and Verification 
Role: Software Engineer
Time: 2022/10 - 2023/07
Contribution: Construct An Universal Test Platform for Mainstream Industrial Robotic Arms 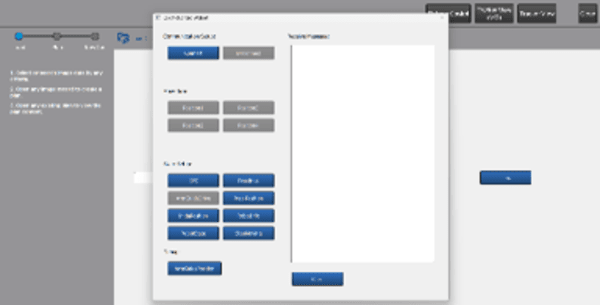
Role: Software Engineer
Time: 2023/12
Contribution: Leverage ChatGPT Create A Mocking Interview Robot 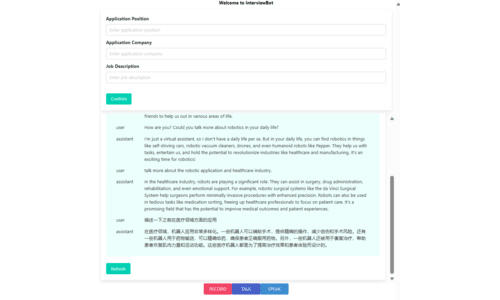
Role: Robotics Software Engineer
Time: 2024/2 - 2024/6
Contribution: Meca500 robotic arm control platform 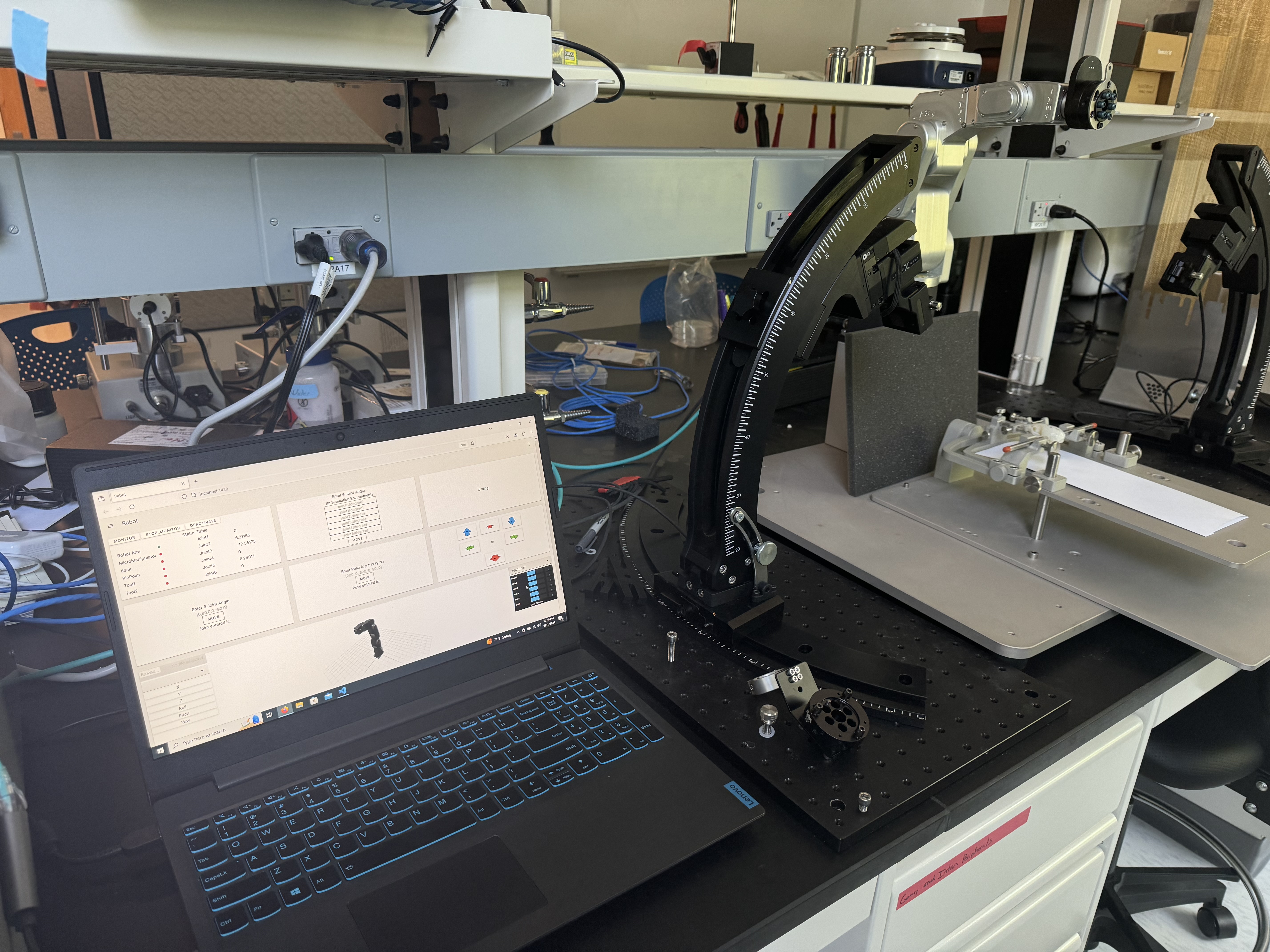
Role: Computer Vision Final Project
Time: 2023/08 - 2023/12
Contribution: Leverage Semi-Supervised Training Increase Model Segmentation Accuracy 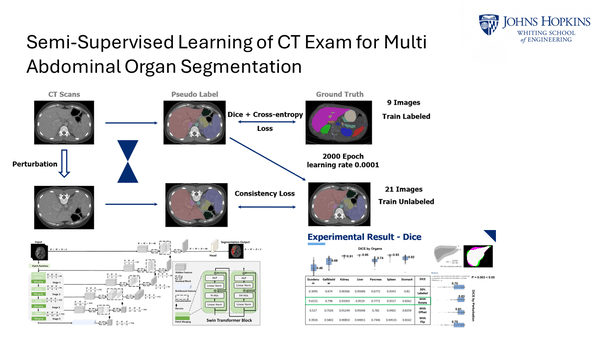
Role: System Verification Engineer
Time: 2020/03 - 2023/7
Contribution: Mazor XC Funtions and Algorithm Verification 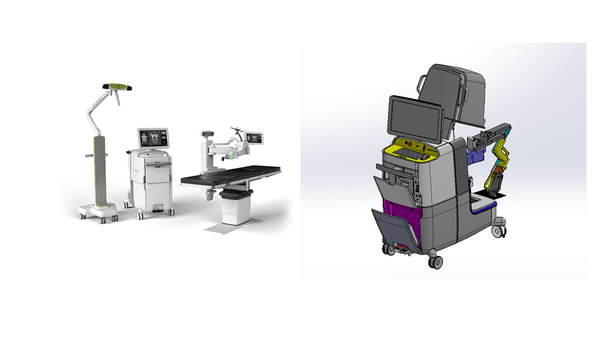
Role: Robotic System Programming Final Project
Time: 2024/3 - 2024/6
Contribution: Turtlebot4 and ManipulatorX Arm Simulation and Control 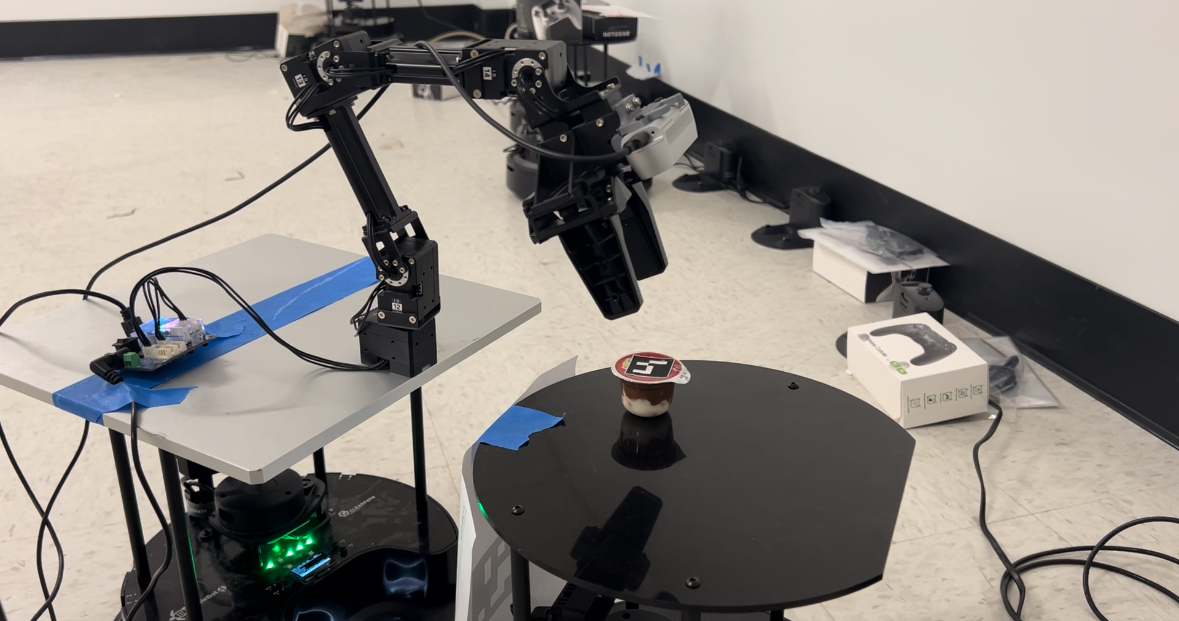
Role: Product Design Engineer
Time: 2017/11 - 2018/9
Contribution: New Generation of Transducer Simulation and Design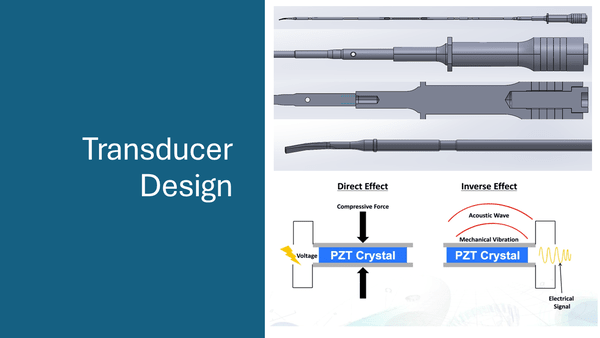
Role: Embedded Software Engineer
Time: 2025/2 - 2025/6
Contribution: Developed a Zigbee-based Smart Appliance Control System Which Can Either Control the Motored Appliance Locally by Joystick or Remotely via a Hyperterminal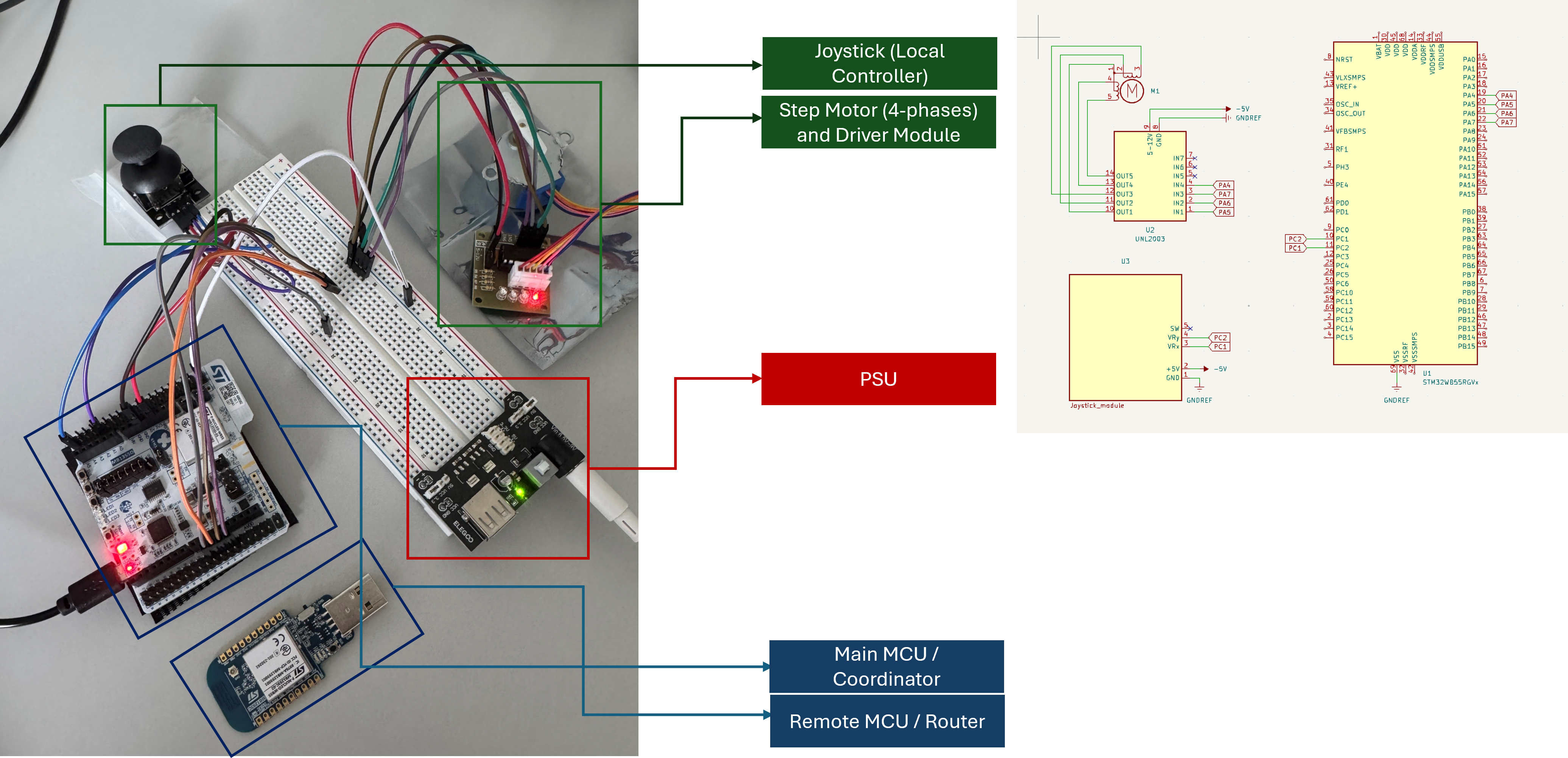
Published in WO/2021/022510, 2021
This innovation represents a significant advancement in energy-based medical devices (EBDs), specifically tailored for laparoscopic surgery applications. It’s ingeniously designed to assist surgeons in two critical areas. Firstly, it provides an invaluable aid in accurately locating bleeding spots within blood ponds, a common challenge in the minimally invasive environment of laparoscopic procedures. Secondly, this device addresses the issue of surgical plume, a frequent obstacle to clear visualization during these surgeries. By effectively managing and reducing surgical plume, it ensures that surgeons maintain an unobstructed view of the surgical site, thereby enhancing both the safety and efficiency of the operation. This dual functionality marks a notable leap forward in surgical technology, offering tangible benefits in operative precision and patient outcomes.
Download here
Published in WO/2021/217339, 2021
This innovative and versatile energy-based device (EBD) integrates multiple functions [coagulation, cutting, irrigation, suction] into a single, comprehensive tool. Despite its multifunctionality, surgeons have expressed concerns regarding the cumbersome and repetitive task of cleaning tissue eschar. Typically, this requires removing the device from the abdomen, an extra step that not only prolongs the surgery but also risks injuring the patient through repeated contact with the abdominal wall. Additionally, such removal can lead to the loss of pneumoperitoneum. The distinctive feature of this innovation, setting it apart from conventional devices, lies in its design at the distal end of the electrode. Here, a specially designed valve and cleaning mechanism allow for in-situ cleaning of the eschar, eliminating the need to withdraw the device from the abdomen. This advancement significantly streamlines the surgical process, enhancing both efficiency and patient safety.
Download here
Published in WO/2023/178631, 2023
The image corrector, pivotal for implementing image distortion correction algorithms, is designed to be seamlessly integrated with specific C-arm devices. Its importance is particularly pronounced in the case of intensifier C-arms, which, unlike their flat-panel counterparts, are more prone to significant image distortion. A challenge, however, arises from the lack of uniform design standards across different C-arm models. To address this issue and ensure both appropriate and precise integration, a universal image corrector adapter has been meticulously developed. This adapter is tailored to accommodate the varying design specifications of C-arm devices, thereby ensuring optimal functionality and accuracy of the image correction process.
Download here
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.